Tổng quan ROS2 Robot
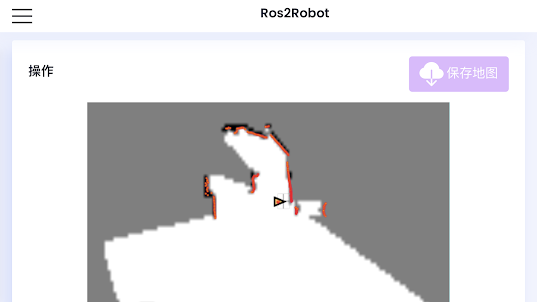
Các chức năng chính: Nó có thể được sử dụng để xây dựng và hiển thị các phương tiện không người lái ROS2;
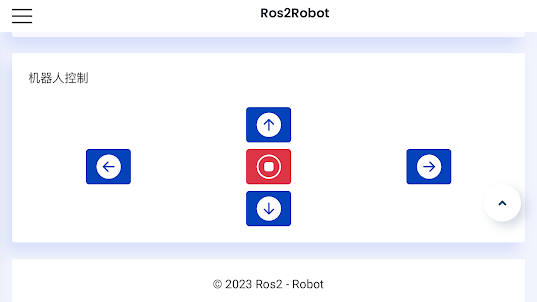
Nó có thể điều khiển chiếc ô tô không người lái ROS2 đi bộ;
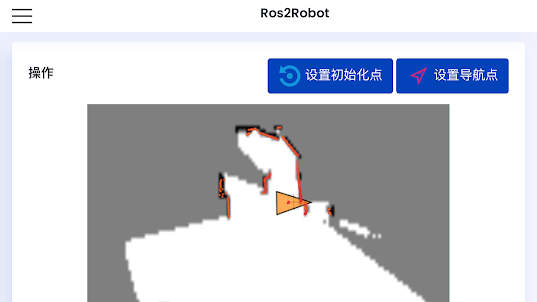
Nó có thể điều khiển ô tô không người lái ROS2 để đặt điểm khởi tạo và đặt điểm điều hướng;
Nó có thể hiển thị các hình ảnh được thu thập bởi camera USB của ô tô không người lái ROS2.
Nó có thể điều khiển chiếc ô tô không người lái ROS2 đi bộ;
Nó có thể điều khiển ô tô không người lái ROS2 để đặt điểm khởi tạo và đặt điểm điều hướng;
Nó có thể hiển thị các hình ảnh được thu thập bởi camera USB của ô tô không người lái ROS2.
Xem thêm