Tổng quan Robot Calibration by SprutCAM
Hiệu chỉnh Robot hoạt động với MachineMaker 2.0
Ứng dụng tự động chuyển dữ liệu về vị trí công cụ sang MachineMaker 2.0.
Hiệu chuẩn Robot hỗ trợ hiệu chuẩn TCP cho các loại robot sau:
- Fanuc
- Kuka
- Đuốc
- Borunte
- CRP
- Denso
- Dobot
- Estun
- Hiwin
- Huyndai
- Motoman
- Người mới
- Manutec
- Nachi
- OTC Daihen
- Torino
Nó hoạt động như thế nào:
- Quét mã QR trong MachineMacker 2.0 để liên kết ứng dụng với dự án;
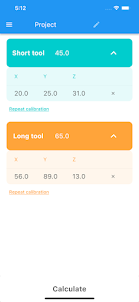
- Thu thập dữ liệu TCP của robot. Đầu tiên là với một công cụ ngắn, sau đó là một công cụ dài;
- Nhập số đọc XYZ. Nhập chiều dài phần nhô ra của dụng cụ tính từ trục chính tính bằng milimét
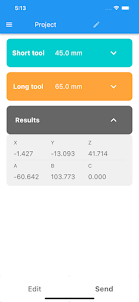
Nhấp vào "Tính toán"
Ứng dụng tự động chuyển dữ liệu về vị trí công cụ sang MachineMaker 2.0.
Hiệu chuẩn Robot hỗ trợ hiệu chuẩn TCP cho các loại robot sau:
- Fanuc
- Kuka
- Đuốc
- Borunte
- CRP
- Denso
- Dobot
- Estun
- Hiwin
- Huyndai
- Motoman
- Người mới
- Manutec
- Nachi
- OTC Daihen
- Torino
Nó hoạt động như thế nào:
- Quét mã QR trong MachineMacker 2.0 để liên kết ứng dụng với dự án;
- Thu thập dữ liệu TCP của robot. Đầu tiên là với một công cụ ngắn, sau đó là một công cụ dài;
- Nhập số đọc XYZ. Nhập chiều dài phần nhô ra của dụng cụ tính từ trục chính tính bằng milimét
Nhấp vào "Tính toán"
Xem thêm